What I Do我能做什么
Vision Systems视觉系统
OpenCV/YOLO solutions for detection, tracking, and measurement on edge devices. 基于OpenCV/YOLO的检测、追踪与测量,适配边缘设备。
Robotics & ROS机器人与ROS
Navigation, manipulation, and perception pipelines for real tasks. 导航、操控与感知流程,面向真实任务。
Industrial Automation工业自动化
Siemens PLC + TIA Portal, robust networks, and on-site commissioning. 西门子PLC与TIA Portal,工业网络与现场调试。
Data & Research数据与研究
Modeling, experimentation, and reproducible analysis for decisions and papers. 建模与实验,数据驱动的决策与论文产出。
Console命令行
$
Education教育背景
- Bachelor of Engineering in Automation 自动化专业 本科 Sep. 2022 - June 2026 (Expected) 2022.09 - 2026.06
- Average Overall Score:均分: 88.05/100
- Core Courses:核心课程: Signals and Systems (93), Linear Algebra (92), Embedded System Design (A), Digital Image Processing (A), Modern Control Theory (88)信号与系统 (93), 线性代数 (92), 嵌入式系统 (A), 数字图像处理 (A), 现代控制理论 (88)
Research & Publications科研经历
- First Author | Solution Concentration Monitoring Device Design 队长/一作 | 基于OpenCV的溶液浓度检测装置 Apr. 2023 - Dec. 20232023.04 - 2023.12Published in University Chemistry (Peer-reviewed Journal, Hosted by Peking University) 成果: 发表于北京大学主办的《大学化学》期刊
- Authored a first-author paper (DOI: 10.12461/PKU.DXHX202404036) detailing a novel vision-based concentration detection device.作为第一作者撰写论文(DOI: 10.12461/PKU.DXHX202404036),详细介绍了一种基于视觉的创新浓度检测装置。
- Engineered a Raspberry Pi + OpenCV vision system; built a regression between solution color (HSV) and concentration based on Lambert–Beer law, achieving a correlation coefficient R² > 0.99.开发了树莓派+OpenCV视觉系统;依据朗伯–比尔定律建立颜色(HSV)与浓度的回归关系,相关系数R² > 0.99。
- Devised a custom 3D-printed black-box environment and disabled camera auto-white-balance to eliminate light interference, ensuring data integrity and measurement repeatability.设计了定制的3D打印黑箱环境,并禁用相机自动白平衡以消除光线干扰,确保了数据完整性和测量可重复性。

- Co-author | Intelligent Bird Recognition for River Ecosystems 成员/共作 | 基于深度学习的河湖鸟类智能识别 July 2024 - Sep. 20252024.07 - 2025.09Paper submitted to the Chinese Journal of Applied Ecology (A National Core Journal, CSCD Indexed, Under Review) 成果: 论文已投稿至《应用生态学报》(国家核心期刊, CSCD索引, 在投)
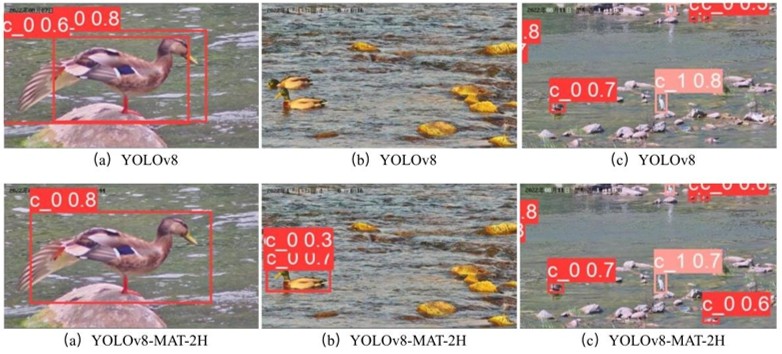
- Co-developed the YOLOv8-MAT-2H model by integrating MSBlock and ADown modules to enhance feature extraction for small, complex targets in ecological monitoring.合作开发了YOLOv8-MAT-2H模型,通过集成MSBlock和ADown模块增强了对生态监测中小而复杂目标的特征提取能力。
- Optimized the model to improve mAP@0.5:0.95 by 2.57% while simultaneously reducing model parameters by 20%, ideal for edge device deployment.优化模型使mAP@0.5:0.95提升2.57%,同时将模型参数减少20%,适合边缘设备部署。
- Spearheaded strategies to handle environmental occlusions in real-world river settings, contributing directly to the system's final operational accuracy of nearly 80% for the Beijing Water Authority.主导制定了应对真实河流环境中遮挡问题的策略,为系统最终达到接近80%的业务准确率(服务于北京市水务局)做出了直接贡献。
- Research Member | Fiber Optic Biosensor for Tumor Marker Detection 成员 | 用于肿瘤标志物检测的光纤生物传感器 Jan. 2025 - Apr. 20252025.01 - 2025.04
- Contributed to a project developing a fiber optic biosensor that improved the detection limit by 15 times compared to traditional ELISA technology.参与开发了一种光纤生物传感器,其检测限比传统ELISA技术提高了15倍。
- Executed data processing algorithm optimization and participated in sensor design and validation, helping to reduce detection time from hours to just 5 minutes.负责数据处理算法优化及传感器设计验证,帮助将检测时间从数小时缩短至仅5分钟。

Key Engineering & Competition Projects工程与竞赛
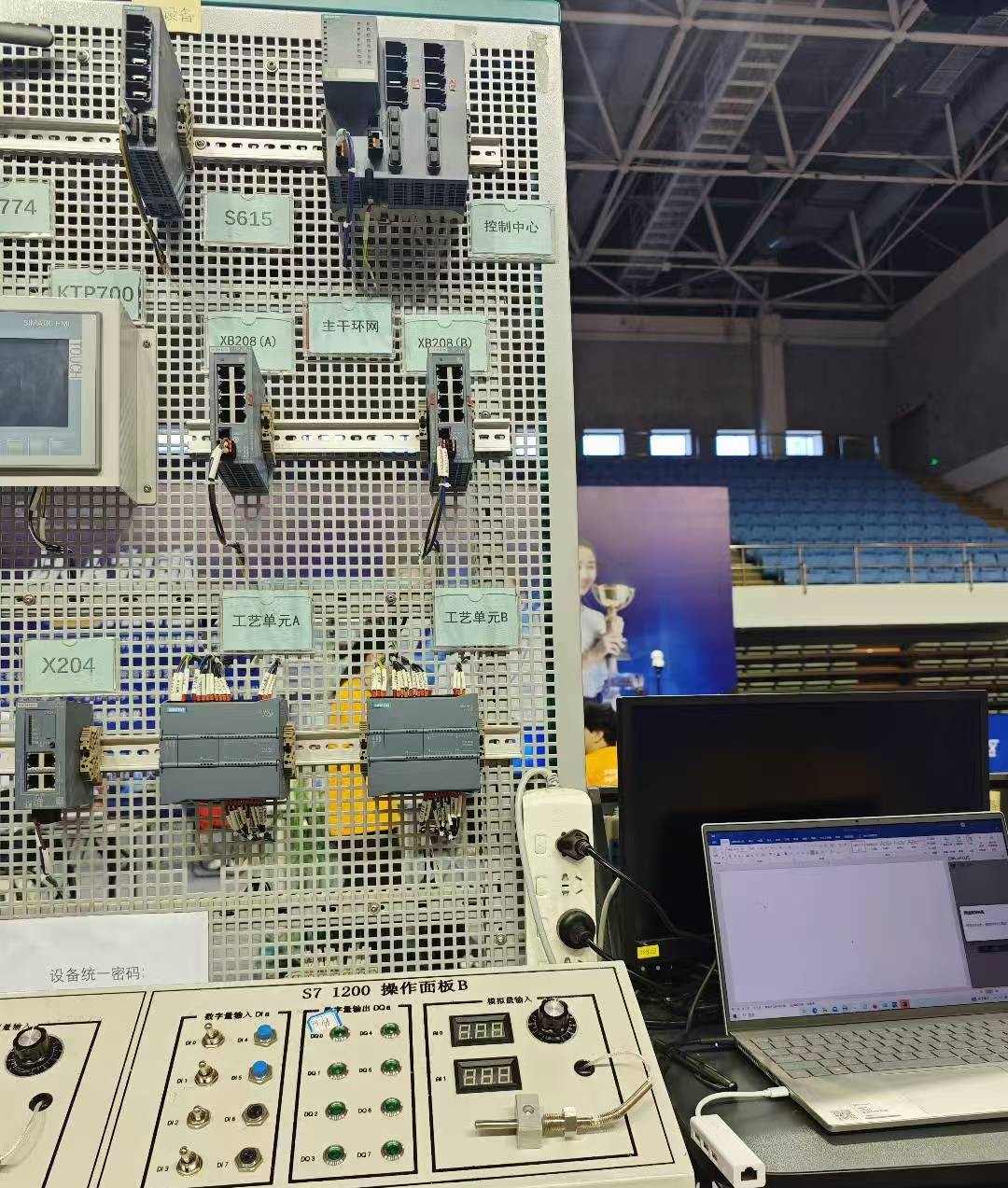
- Team Captain | "Siemens Cup" China Intelligent Manufacturing Challenge 队长 | “西门子杯”中国智能制造挑战赛 Aug. 20242024.08Information & Networking Track,信息化与网络化赛道, 1st Prize (North China Region)华北赛区一等奖
- Led a team to design and deploy a complete industrial network system for a simulated factory environment.带领团队为模拟工厂环境设计并部署了一套完整的工业网络系统。
- Architected the network topology from abstract requirements, defining the IP schema, VLAN segmentation, and firewall access control policies.根据抽象需求构建网络拓扑,定义了IP规划、VLAN分段和防火墙访问控制策略。
- Engineered and commissioned the entire system, configuring Siemens S7 PLCs and industrial switches via TIA Portal to ensure robust, redundant communication.工程实现并调试了整个系统,通过TIA Portal配置西门子S7 PLC和工业交换机,确保了稳定、冗余的通信。
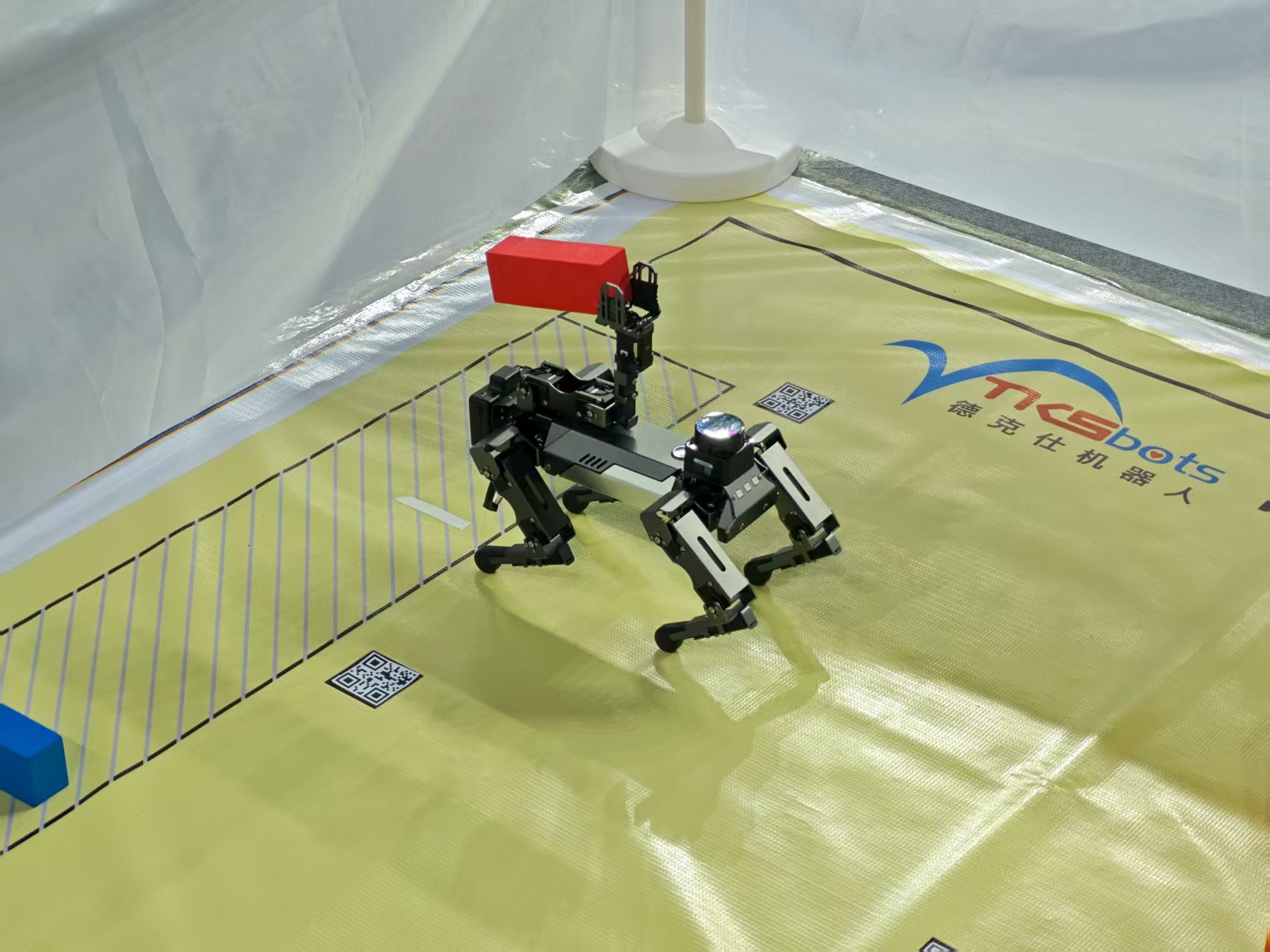
- Team Captain | Raicom Robot Developer Competition 队长 | 睿抗机器人开发者大赛 Oct. 20242024.10Quadruped Robot Collaborative Challenge,四足机器人协同挑战赛, 2nd Prize (National Final)全国总决赛二等奖
- Directed the team and developed main functional packages using ROS for a quadruped robot to perform autonomous navigation, object manipulation, and animal recognition.指导团队并使用ROS为主功能包进行开发,使四足机器人能够执行自主导航、物体操纵和动物识别。
- Engineered an innovative solution to overcome hardware limitations of the Raspberry Pi by implementing a "position-then-detect" strategy, capturing and processing a single frame to bypass real-time video latency.设计了一种创新方案,通过实施“先定位后检测”策略,捕捉和处理单帧图像,绕过实时视频延迟,从而克服了树莓派的硬件限制。
- Trained and deployed a YOLOv8 model that achieved 91.5% accuracy in identifying six types of animals under variable lighting conditions through targeted data augmentation.训练并部署了一个YOLOv8模型,通过有针对性的数据增强,在多变的光照条件下识别六种动物的准确率达到91.5%。
- Modeling & Programming Lead | "Shuwei Cup" University Student Mathematical Modeling Challenge 建模与编程负责人 | “数维杯”全国大学生数学建模竞赛 May 20252025.05Tourism Prediction Model 旅游预测模型, National Second Prize全国二等奖
- Architected and fused Random Forest and XGBoost models on 20 years of meteorological data to predict regional weather phenomena.基于20年气象数据,融合Random Forest与XGBoost预测区域性气象现象。
- Modeled and validated a Growing Degree Days (GDD) model to forecast flowering periods for ecological and tourism applications.建立并验证GDD模型预测植物花期,为生态与旅游提供量化依据。
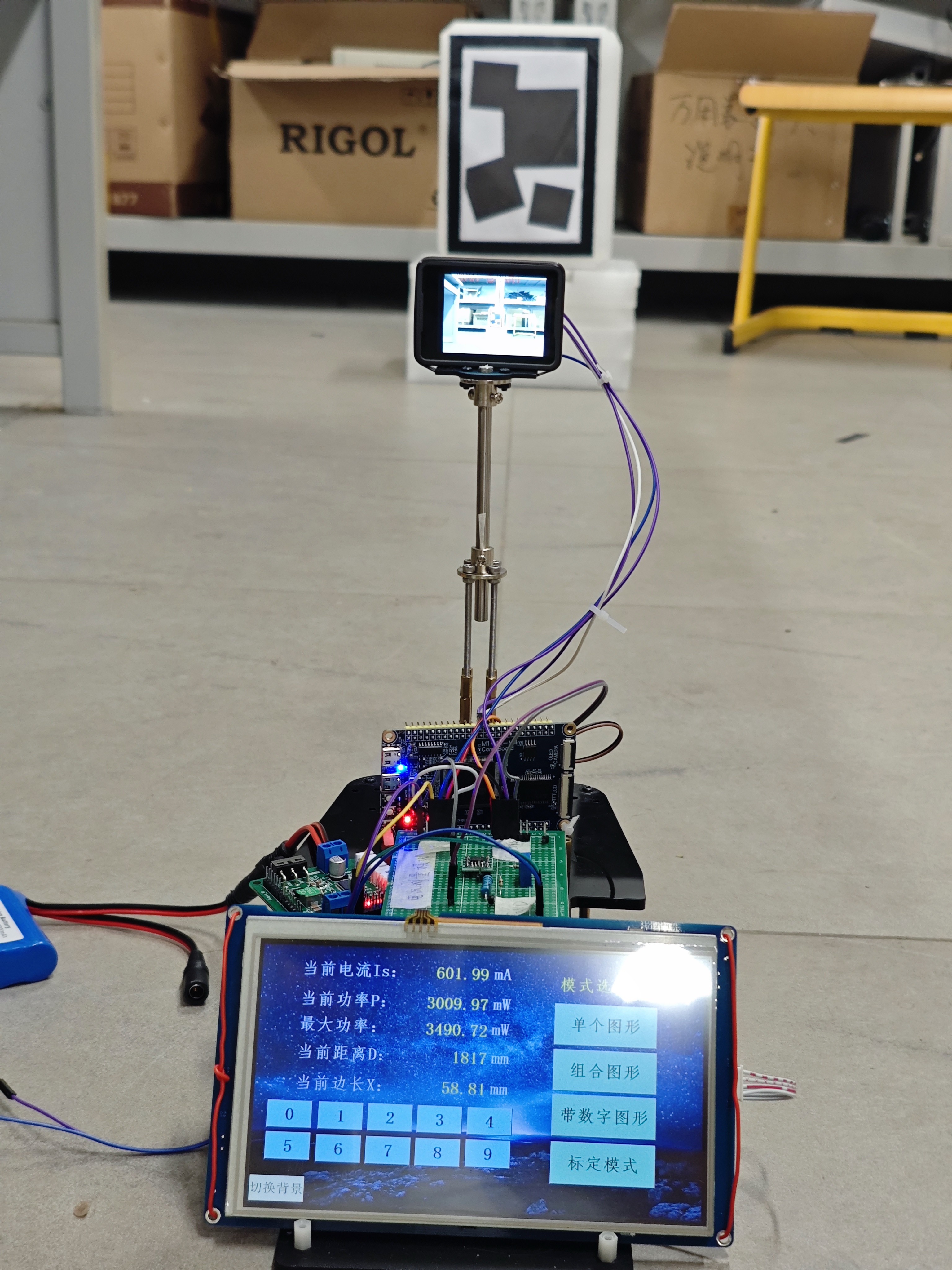
- Core Member | National Undergraduate Electronic Design Contest 核心成员 | 全国大学生电子设计竞赛 July 20252025.07Monocular Vision Measurement Device 单目视觉测量装置, Second Prize (Beijing Region)二等奖(北京赛区)
- Engineered an STM32F407-based embedded vision system to measure object distance and size with a single camera, achieving distance error < ±2cm and size error < ±0.5cm.基于STM32F407实现嵌入式视觉系统,单目测距与测尺寸,距离误差< ±2cm、尺寸误差< ±0.5cm。
- Applied non-linear fitting for distance calibration and perspective transform to correct distortion, improving accuracy.采用非线性拟合进行距离标定并使用透视变换校正畸变,提升准确度。
- Integrated a lightweight YOLOv5s for robust detection in complex scenes, demonstrating embedded AI capability.集成轻量YOLOv5s实现复杂场景鲁棒检测,体现嵌入式AI能力。
- Team Member | "China International College Students' Innovation Competition 成员 | 中国国际大学生创新大赛 July 20252025.07Project: An intelligent monitoring system for industrial centrifuges, 项目:工业离心机智能监测系统, Provincial Semi-finalist省赛半决赛入围(北京市二等奖)
- Owned the functional development and data analysis for the monitoring subsystem within a complex project targeted at the nuclear sector.负责一个面向核工业领域的复杂项目中,监测子系统的功能开发和数据分析。
- Delivered critical code modules that ensured the stability and integrity of the multi-sensor data stream, foundational for the system's fault diagnosis and vibration suppression capabilities.交付了确保多传感器数据流稳定性和完整性的关键代码模块,为系统的故障诊断和振动抑制能力奠定了基础。
Internship Experience实习经历
- Electronic Controls Intern | Shenzhen Jowin Energy Technology Co., Ltd. 电子控制实习生 | 深圳市卓益节能环保设备有限公司 Jul. 2025 – Present2025.07 – 至今
- Designed PCB layout for an Automatic Sewage and Scale Removal Controller using Altium Designer.使用 Altium Designer 设计“自动排污除垢控制器”控制板 PCB。
- Developed initial firmware in C for a 51 MCU to manage timed discharge and descaling based on sensor inputs.基于 51 单片机用 C 开发初版固件,按传感器输入执行定时排污与除垢。
- Contributed to the electronic control solution from schematic to preliminary code for a new energy-saving product.参与从原理图到初版代码的电子控制方案,服务于节能类新品。
- Testing Intern | Guangzhou Dapsen Intelligent Equipment Co., Ltd. 测试实习生 | 广州达普绅智能设备有限公司 July 2024 – Aug. 20242024.07 – 2024.08
- Analyzed a plastic bottle inspection line to identify critical failure points in the assembly and sensor calibration processes.分析了塑料瓶检测生产线,以确定装配和传感器校准过程中的关键故障点。
- Engineered a revised debugging workflow which was adopted by the team, reducing setup time by an estimated 15% and improving overall operational stability.设计了一套修订的调试工作流程并被团队采纳,将设置时间估计减少了15%,并提高了整体运营稳定性。
Honors & Awards获奖情况
- 3rd Prize全国三等奖, China Robotics and Artificial Intelligence Competition (National),中国机器人大赛与人工智能大赛 Aug. 20252025.08
- 2nd Prize全国二等奖, "Shuwei Cup" University Student Mathematical Modeling Challenge (National),“数维杯”全国大学生数学建模竞赛 May 20252025.05
- 2nd Prize北京赛区二等奖, National Undergraduate Electronic Design Contest (Beijing Region),全国大学生电子设计竞赛(北京赛区) Jul. 20252025.07
- 2nd Prize北京赛区二等奖, China International College Students’ Innovation Competition (Beijing Region),中国国际大学生创新大赛(北京赛区) Jul. 20252025.07
- 2nd Prize全国二等奖, Raicom Robot Developer Competition (National),睿抗机器人开发者大赛 Oct. 20242024.10
- 1st Prize华北赛区一等奖, "Siemens Cup" China Intelligent Manufacturing Challenge (Regional | North China),“西门子杯”中国智能制造挑战赛 Aug. 20242024.08
- 3rd Prize北京市三等奖, iCAN Innovation and Entrepreneurship Competition (Beijing),iCAN大学生创新创业大赛(北京) Nov. 20242024.11
- 1st Prize校级一等奖, RoboCup China Family Group Project Competition (University Level),RoboCup机器人世界杯中国赛家庭组项目 Dec. 20242024.12
- 2nd Prize二等奖, People's Scholarship (University Level),人民奖学金 2023 & 2025
- 3rd Prize三等奖, People's Scholarship (University Level),人民奖学金 2024